
胡奇强 特任教授 博士生导师
办公地址:中国科大高新校区三号学科楼G3-428
个人简介:
胡奇强,中国科学技术大学工程科学学院/人形机器人研究院 特任教授,博士生导师,入选国家高层次青年人才计划。于2017年本科毕业于重庆大学机械设计制造及其自动化专业,于2022年先后获得中国科学技术大学和香港城市大学两校博士学位,随后在香港城市大学、香港科技大学从事博士后研究工作。于2026年加入中国科大工程科学学院/人形机器人研究院,担任特任教授。
研究方向为柔性智能机器人,涵盖机器人结构设计、感知控制以及应用探索。近些年以第一/通讯作者身份在IEEE TRO (2篇)、Soft Robotics (2篇)、IEEE/ASME TMECH、IEEE TIE、IEEE RA-L (3篇)、Sci China Technol Sci.、IROS等机器人领域权威期刊/会议发表研究论文10余篇,获二十余位相关领域的国内外院士、IEEE Fellow、国家杰青的正面引用评价;获授权2项美国发明专利(1项已转化)和5项中国发明专利;担任TRO、TMECH、TASE、RA-L、AIS、Adv. Sci、AFM、Bioinspir. Biomim.、Smart Mater. Struct.、机器人、ICRA、IROS、RoboSoft等二十余个期刊/会议审稿专家以及多个SCI/EI期刊客座编辑;获首届中国高校机器人创意大赛全国一等奖、第十三届中国科大-香港城大博士生学术论坛杰出报告奖等奖励。
招生信息:
实验室依托中国科大人形机器人研究院,拥有充足的实验办公场地和科研资源,欢迎对机器人前沿研究感兴趣的同学加入!
研究内容:
目前主要研究工作围绕高性能形状记忆合金人工肌肉驱动器及大变形折纸超结构两方面开展;致力于通过创新的结构设计,结合智能化的感知、驱动和控制方案,推动柔性机器人技术的工程化应用以及跨学科发展。
1. 高性能形状记忆合金人工肌肉
· 探索SMA人工肌肉驱动机理,创新研制SMA人工肌肉模块,提供高性能仿生驱动方案
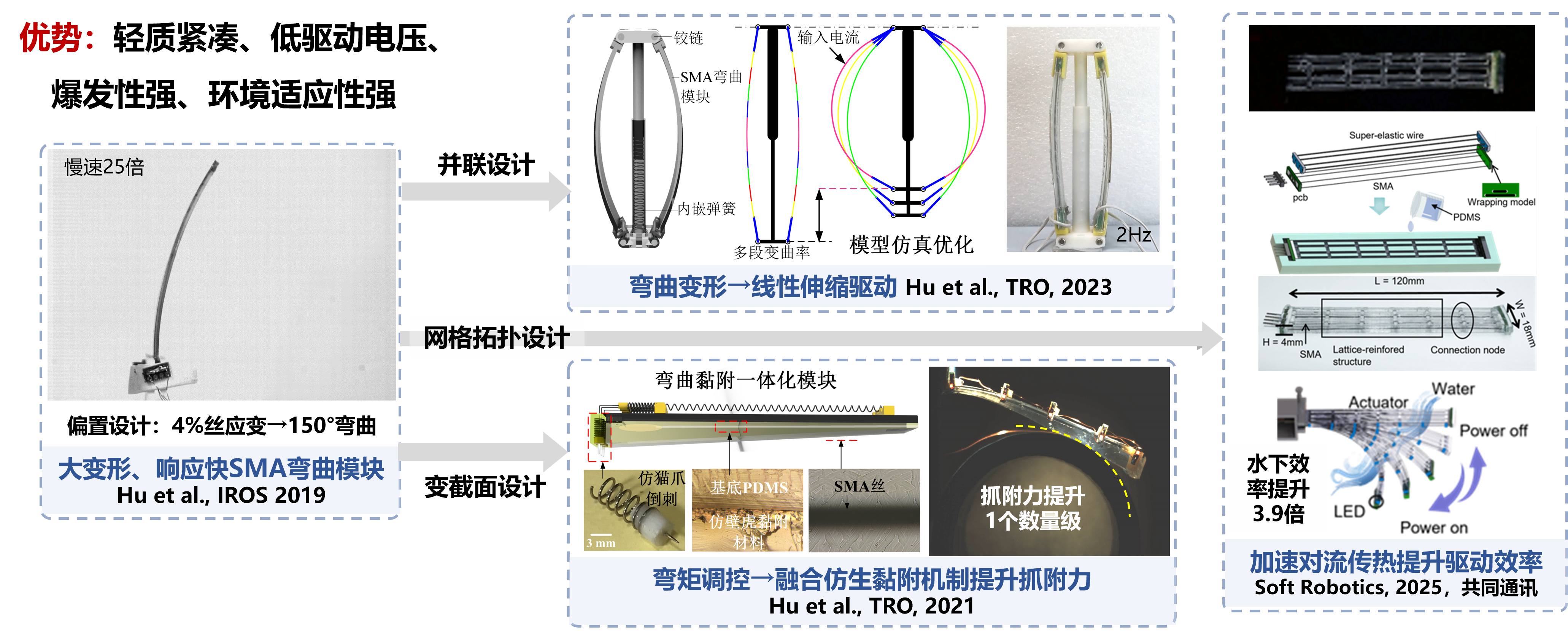
· 集成高效的感知和控制策略,实现SMA人工肌肉精确控制

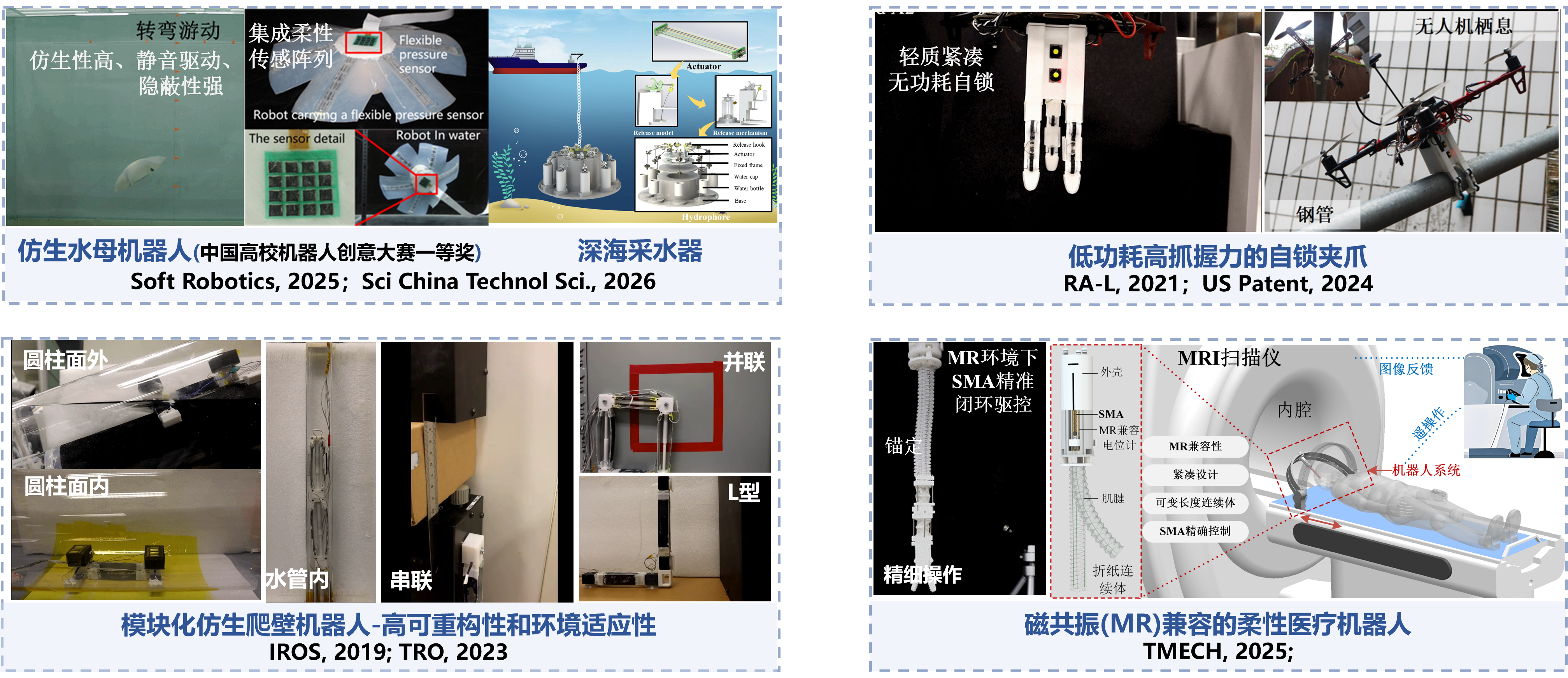
· 研制SMA人工肌肉柔性机器人,探索其在不同场景中的实际应用
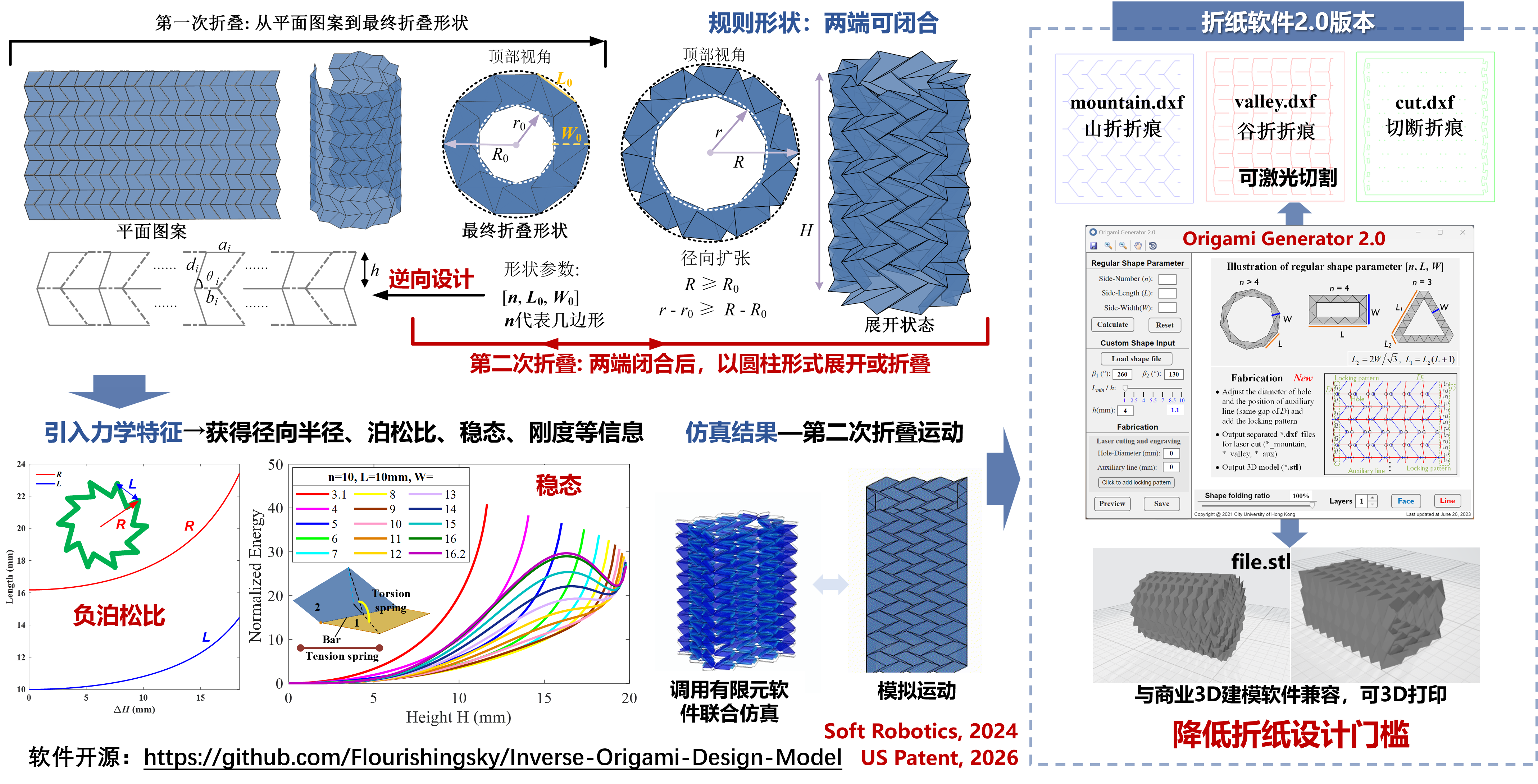
2. 大变形折纸超结构
· 揭示折痕参数与折叠形状、走向数学关系,提出折纸逆向设计模型,研发易于使用的折纸逆向设计软件,实现折纸程序化设计制造
· 研制柔性折纸机器人,解决驱动集成设计、运动精确控制问题

近年部分代表性论文:
1. Q. Hu, E. Dong, and D. Sun, "Soft modular climbing robot," IEEE Transaction on Robotics, vol. 39, no. 1, pp. 399-416, 2023.
2. Q. Hu, E. Dong, and D. Sun, "Soft Gripper Design Based on the Integration of Flat Dry Adhesive, Soft Actuator, and Microspine," IEEE Transaction on Robotics, vol. 37, no. 4, pp. 1065-1080, 2021.
3. Q. Hu, J. Li, J. Tao, E. Dong, and D. Sun, "Inverse origami design model for soft robotic development," Soft Robotics, vol.11, no.1, pp. 131-139, 2024.
4. Q. Hu, Y. Ouyang, H. Jin, J. Yang, D. Sun and S. Zhang, "A Compact SMA-Driven Push–Pull Module With Precise Linear Motion," IEEE/ASME Transactions on Mechatronics, Early Access, 2026.
5. Q. Hu, Z. Chen, E. Dong and D. Sun, "Design and Control of a Modular, Untethered Soft Origami Robot Driven by SMA Coils," IEEE Transactions on Industrial Electronics, vol. 72, no. 8, pp. 8208-8218, 2025.
6. Q. Hu, J. Li, E. Dong, and D. Sun, "Soft scalable crawling robots enabled by programmable origami and electrostatic adhesion," IEEE Robotics and Automation Letters, vol. 8, no. 4, pp. 2365-2372, 2023.
7. Q. Hu, H. Huang, E. Dong, and D. Sun, "A Bioinspired Composite Finger With Self-Locking Joints," IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1391-1398, 2021.