为加强中国科大精密机械与精密仪器系全球系友的联系与交流,2023年2月19日,中国科大精密机械与精密仪器系“系友论坛”第十六期线上讲座成功举行。本次讲座邀请9209系友、工程科学学院副院长张世武教授进行“科大九系学科发展暨智能材料及仿生机器人研究进展” 的主题报告,报告由9509系友陈颖芳主持。
张世武教授首先简短介绍了自己的学习工作经历,接着带领大家回顾了科大九系的发展历程。科大九系自1978年成立以来在黄文浩老师带领下不断发展,于1998年获得博士学位点,随后在2017年教育部第四轮全国学科评估中获得B+成绩,2019年荣获批精密科学仪器安徽省重点实验室,在2021年参加教育部第五轮的全国学科评估。随后张世武教授介绍了九系当前发展现状以及师资和海外人才引进情况。并着重介绍了九系对人才的培养方针:坚持科教报国、红专并进;注重学科交叉的同时加强对学生的素质教育,以提高人才培养质量;加强国际交流活动,培养具有国际视野人才;通过所系结合、科教融合,实现人才储备知识的多元化;坚持理实交融、加强学生创新实践能力培养。九系始终贯彻培养数理基础好、光机电综合、知识面广、面向工程科学大装置的综合性科研人才的教育方针。
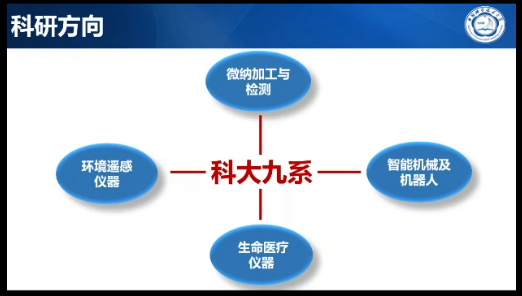
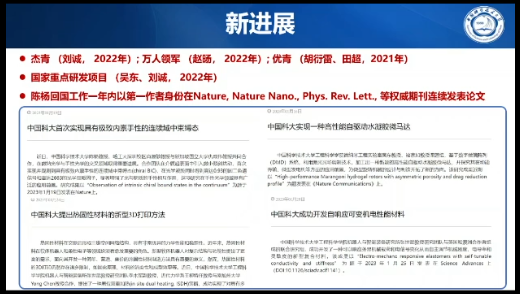
随后张世武教授逐一介绍了科大九系在微纳加工与检测、智能机械及机器人、生命医疗仪器及环境遥感仪器这几大研究方向的进展情况与相关团队发展情况,并重点介绍了九系近期在高水平学术期刊发表的最新进展。
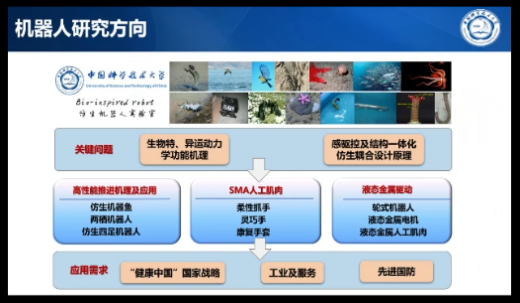
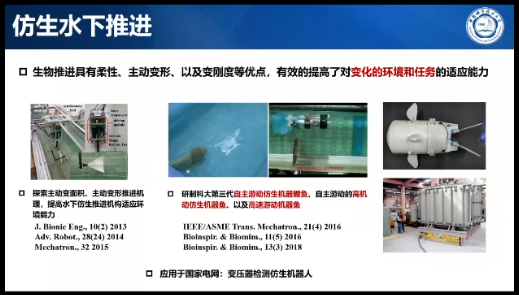
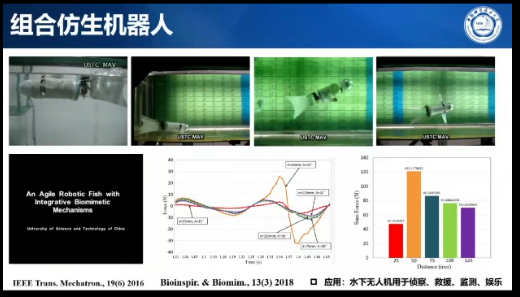
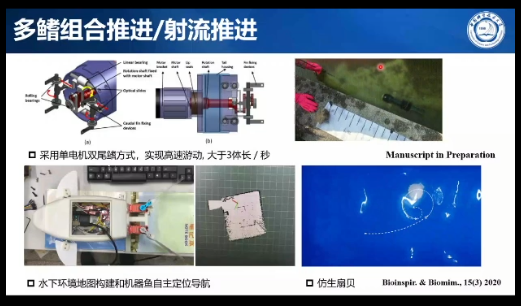
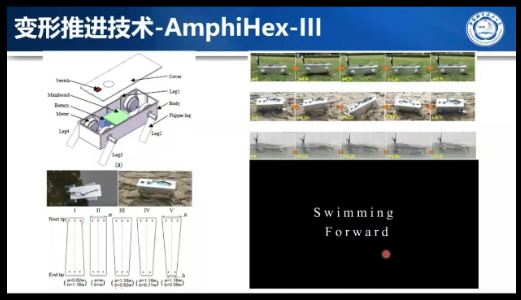
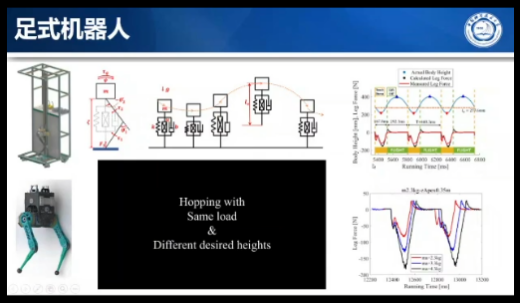
接下来,张世武教授结合自己在科大九系的工作经历,对机器人研究方向进行介绍。团队主要在高性能推进机理及应用、SMA人工肌肉以及液态金属驱动三大方向开展研究,其中每个方向分别被细分为多个小方向,张世武教授逐一进行了详细的介绍。首先是仿生水下推进,团队通过主动改变机器人形状、面积以提高其在水中的推进性能,进而提高对环境变化的适应能力。张世武教授介绍了其中一种水下推进机器人课题,该机器人通过多个仿生鱼鳍的组合实现了多方向的快速游动功能。此外,还介绍一种通过改变自身形状的两栖推进机器人,该机器人已经经过三次迭代,目前能够在水下和地面两种环境中完成推进运动。通过对人与动物行走动作的研究,设计制作了足式仿生机器人。这种机器人能够有效地模仿动物的运动状态,不仅能够朝指定方向转弯,还能完成跳跃这类较难的运动。
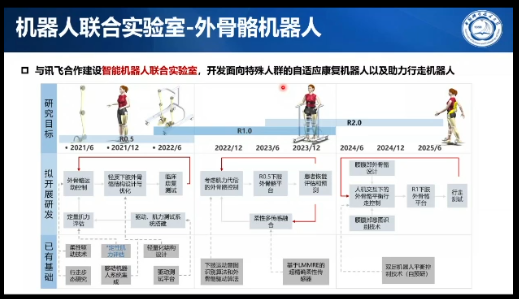
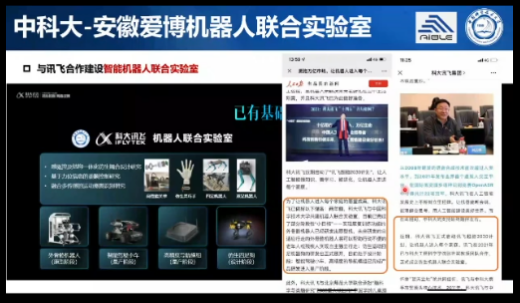
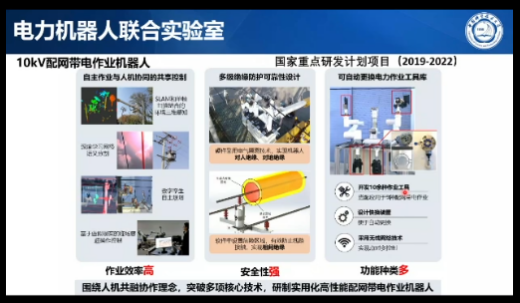
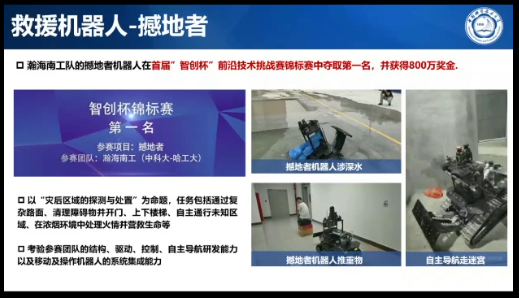
目前张世武教授所带领的团队与科大讯飞联合研制一种外骨骼机器人,该项目在医学康复领域有着重要的应用前景。此外,课题组与国家电网安徽省电科院也有合作实验室,主要研发故障检测机器人、替代人工完成高压配电作业的工具机器人等。课题组与哈工大深圳校区联合研制了“撼地者”救援机器人,该机器人在智创杯锦标赛中取得了第一名的成绩,能够在崎岖路面上行进,推开障碍物,并能够在浓烟环境中进行救援作业。此外,课题组还通过对各种环境的模拟,对机器人进行人工智能深度学习算法训练,使救援机器人能够在各种灾害情况下做出最优解救决策,增加完成救援行动的成功率。
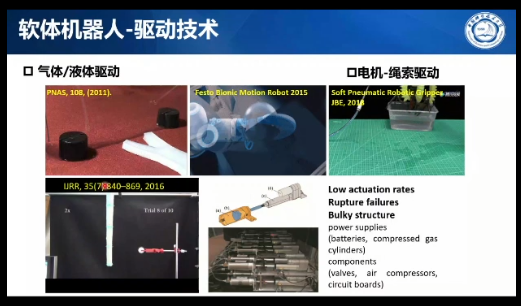
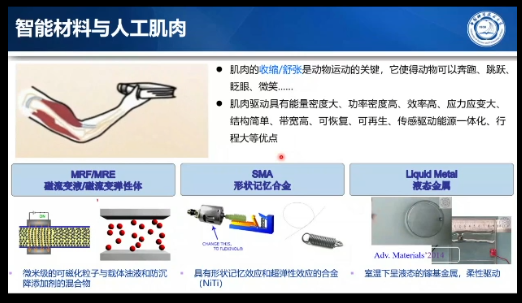
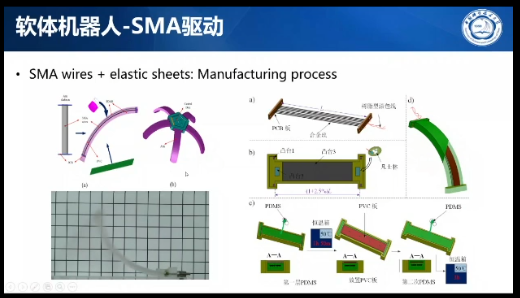
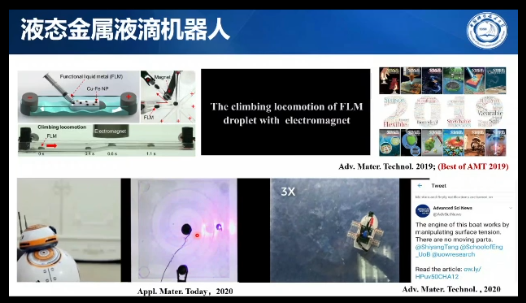
不同于传统刚体机器人,仿照章鱼、蚯蚓、蠕虫等软体动物,课题组开展了软体机器人的研究。这类机器人具有很强的灵活性,相比于刚体机器人更能够根据所处环境改变自身形状,具有更强的环境适应性。不同于气液驱动和电机驱动,张世武教授所带领团队基于磁流变、形状记忆聚合材料、液态金属制备的智能材料人工肌肉为主要驱动方式。张教授着重介绍了形状记忆材料制备的软体机器人,课题组目前已经实现了对形状记忆材料的精准控制,并借此成功设计制造了许多相关软体机器人。液态金属软体机器人是最近新兴的一个研究方向,在电场内能够进行形变和滚动。结合液态金属的运动方式能够获得新的驱动力。
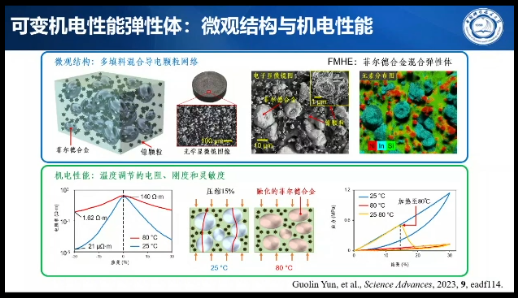
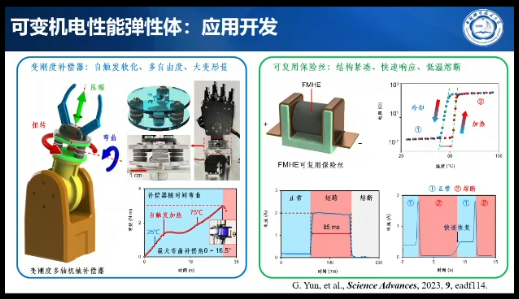
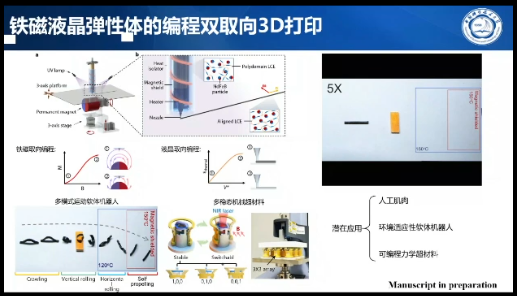
最后,张世武教授还介绍了课题组的其他几类机器人及制造新技术,包括基于可变机电性能弹性体的机器人及应用,这种材料兼备弹性体材料软弹特性和导体的基本特性,能够直接应用于机器人的开发制备工作;通过新型的热固性材料3D打印方法为材料成型提供了新策略,现在已经应用于机器人制备过程中;由铁磁液晶弹性体制备的可编程双取向3D打印技术能够制备新型磁响应弹性机器人。

报告人简介:
张世武,9209,科大九系教授、博导,工程科学学院副院长。中国仪器仪表学会精密机械分会副主任委员、安徽省机械工程学会常务理事。从事多年仿生机器人研究,研制出多代仿生机器鱼、软体机械臂、仿生灵巧手、两栖机器人、救援机器人、液态金属人工肌肉、液态金属电机等各类特种机器人。成果多次被新华社、光明日报、央视、New Scientist、RUPTLY等国内外主流媒体和期刊报道。获中国机器人年度十大科技进展、首届智创杯前沿技术挑战赛锦标赛冠军、安徽省教学成果特等奖、中科院教育教学成果一等奖、合肥市十大创新人物等。
撰稿人:陈奕宇,胡衍雷