中国科学技术大学工程科学学院、人形机器人研究院王洪波研究员团队,基于人手感知机制启发,提出了一种具有自解耦弯曲和力感知的仿生手指,其弯曲感知和力感知的分辨率分别为0.02°和0.4mN,可以实现类人手的物体柔软度识别、肿块搜寻、中医把脉等功能,成果以Toward human-like touch sense via a bioinspired soft finger with self-decoupled bending and force sensing为题发表在国际期刊Cell reports physical science。

研究亮点:
具有本体感觉和触觉感知的仿生软手指
具有高性能和机械耐久性的自解耦双模传感器
通过监测弯曲和施加的力进行类似人手指的物体柔软度检测
软手指演示如“机器人医生”一样用于肿块搜寻和脉搏测量
生活中,人类不仅用手抓握/操纵物体,还可以探索和“感受”世界,并通过触摸与他人互动。人手能够灵巧地操作,并且可以通过使用感官反馈和学习的精细运动控制来执行高技能的任务。而触诊更是被广泛用于早期识别和筛查人体异常。在中医中,医生可以通过按压桡动脉区域来测量患者手腕处的脉搏,以了解他/她的心脏状况。一方面,由于缺乏训练有素、经验丰富的医生,一些疾病或潜在风险可能无法及时发现以防止恶化。另一方面,很大一部分人不愿意接受体检,特别是那些正在接受异性医生检查的人。因此,机器人触诊在研究界引起了广泛关注。而具有优异感知能力的软手指无疑是为这一场景应用提供了极具潜力的解决方案。
针对这一场景,研究人员基于改进的PneuNet结构手指无缝集成导电纤维线圈,用于自解耦弯曲和力传感,通过测量线圈绕组两端之间的电感和电阻,可以同时实时监测软手指的弯曲和指尖的力,且具有极高的分辨率。在手指本体工作的同时,可以实时获取手指形状和外界接触信息。

图1具有自解耦弯曲和力传感的BSF以及用于体检的“机器人”概念
研究团队提出的仿生手指凭借其交互的安全性、优异的感知性能,能够实现类似人手的物体柔软度识别,能够区分多种硅胶、西红柿、豆腐的刚度,并能够实现皮下预埋肿物的阵列式识别扫描,此外还可以像传统中医一样,实现把脉的功能,这些结果表明了其有望作为开发下一代机器人医生和仿生灵巧手的重要组成部分。
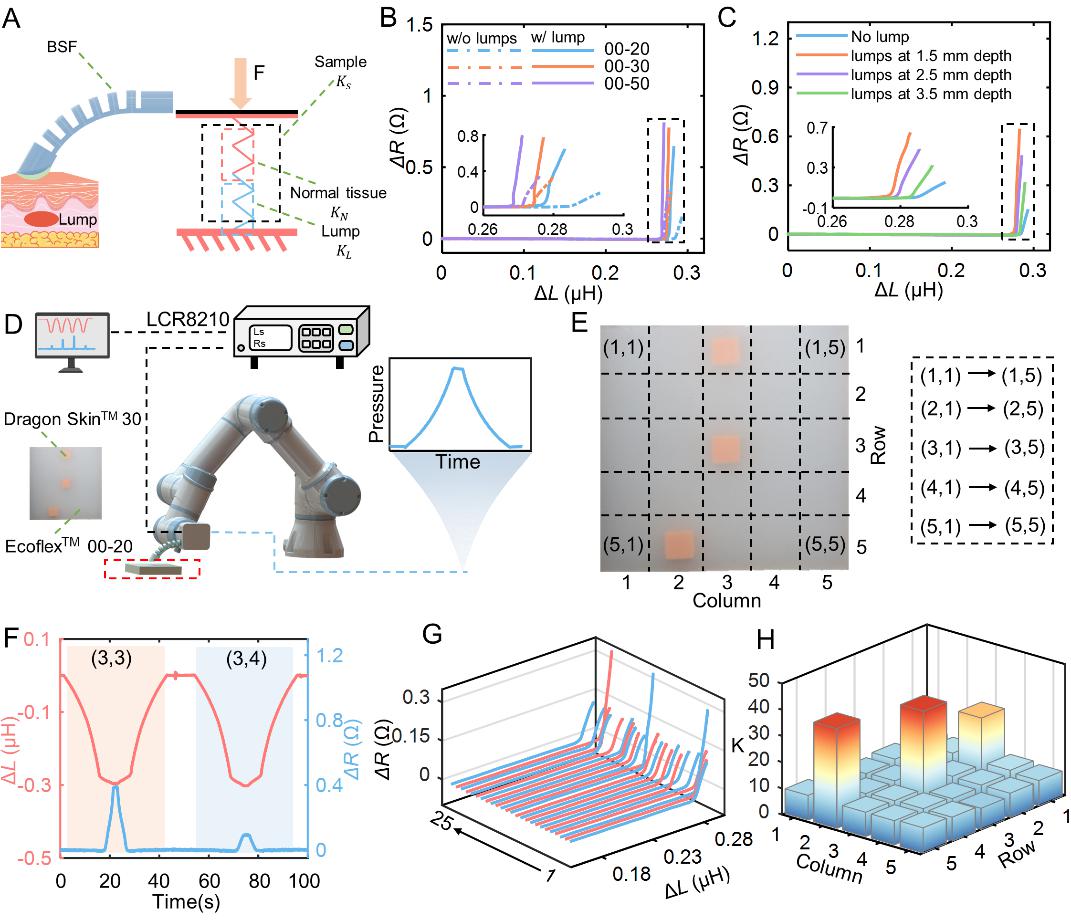
图2通过BSF进行肿块识别和搜索
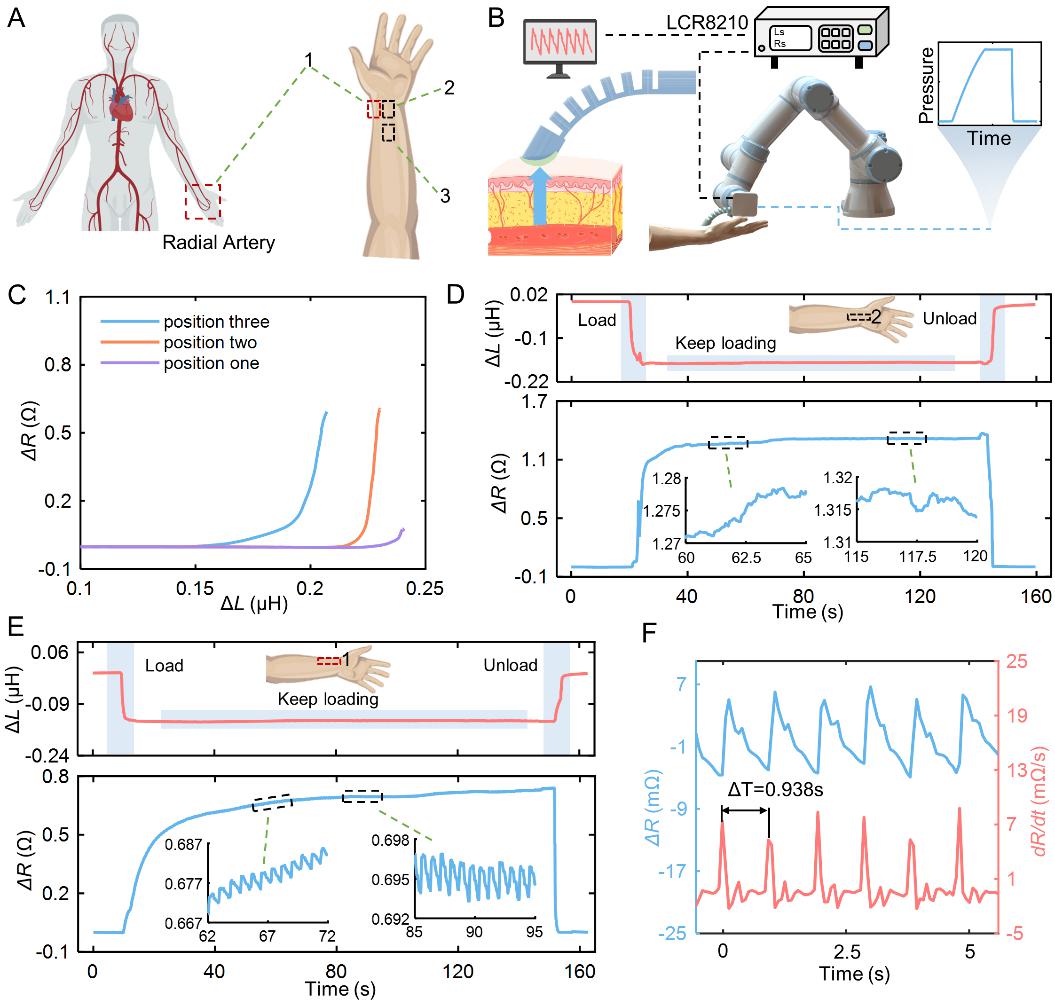
图3通过BSF进行桡动脉定位和脉搏测量
以上工作得到了中国国家自然科学基金(no.52275579)、中国科学院人才引进计划和中国科学技术大学启动资金的支持。中国科学技术大学精密机械与精密仪器系博士生汪宇峰为论文第一作者,中国科学技术大学王洪波研究员为论文通讯作者。
链接:https://doi.org/10.1016/j.xcrp.2024.102225