为加强中国科大精密机械与精密仪器系全球系友的联系与交流,2026年6月14日,中国科大精密机械与精密仪器系“系友论坛”第五十四期线上讲座成功举行。本次讲座邀请李木军、王洪波、贠国霖系友为大家带来主题为“机器人传感沙龙”的精彩报告。本次论坛由系友陈颖芳主持。
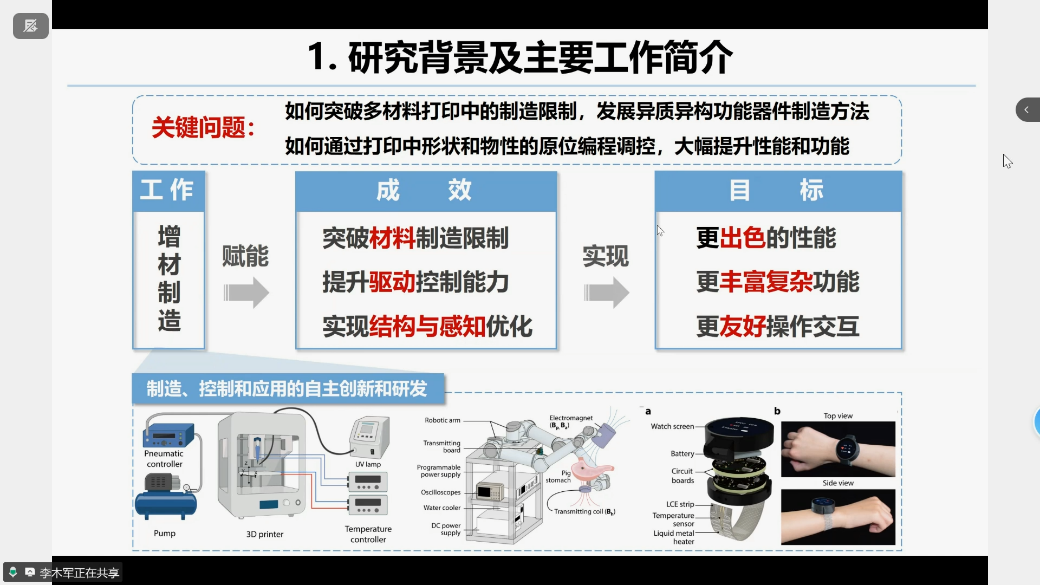
首先由李木军系友带来“3D打印柔性触觉与软体机器人功能器件”的主题报告,报告围绕“研究背景及主要工作简介、3D打印柔性传感器、3D打印软体机器人、研究展望”四个部分展开。李木军介绍,柔性功能器件主要包括触觉传感器、软体机器人和软体驱动器等,具有良好的灵活性、柔顺性和可变形性,在仿生机器人、生物医学及可穿戴设备等领域具有广阔的应用前景。然而,此类器件目前在机电性能、复杂变形设计、驱动与感知融合以及功能多样性等方面仍面临诸多挑战。围绕“如何突破多材料打印中的制造限制,发展异质异构功能器件制造方法”以及“如何通过打印过程中形状和物性的原位编程调控,大幅提升器件性能与功能”等关键问题,他介绍了以增材制造为基础,在材料制造、驱动控制、结构设计和感知优化等方面开展的相关研究,力求实现更出色的性能、更丰富复杂的功能和更友好的操作交互。
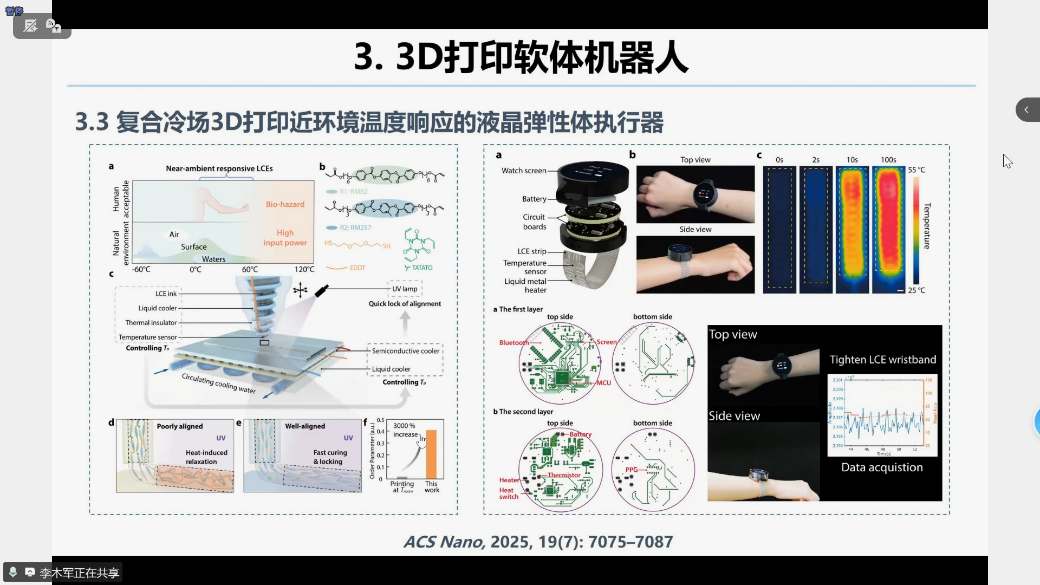
在3D打印柔性传感器方面,李木军重点介绍了超韧、宽线性、高灵敏电容式柔性压力/应变传感器。相关研究兼顾器件的灵敏度、韧性及结构可设计性,为柔性触觉感知器件的制造提供了新的技术思路。在3D打印软体机器人方面,他分别介绍了3D打印磁软体机器人、单参数调控变形模态的液晶弹性体执行器、复合冷场3D打印近环境温度响应液晶弹性体执行器,以及3D打印铁磁液晶弹性体软体机器人等研究成果。其中,近环境温度响应液晶弹性体执行器还被用于可穿戴腕带的设计与数据采集;铁磁液晶弹性体软体机器人则展现出多物理场响应和多模态变形能力。报告最后从数据驱动的建模、设计与控制,结构—驱动—感知一体集成制造,以及软体机器人中的物理智能三个方面展望了未来研究方向。
接下来,王洪波系友作题为“面向真实世界场景的机器人六维力与触觉感知”的主题报告。他围绕柔性传感器、多维力与触觉感知、软体机器人感知及可穿戴传感等方向,系统介绍了团队的研究内容与技术思路。王洪波指出,触觉感知是机器人末端执行器和机械手完成复杂精细操作的重要基础。柔性机械传感器能够感知压强、剪切力、拉伸、压缩、弯曲和扭转等多种力学信息,在手术器械、智能假肢、运动健康监测、机器人力触觉感知和软体机器人等领域具有广泛应用前景,但其在性能、可靠性、耐久性、制造一致性及复杂表面集成等方面仍面临诸多挑战。

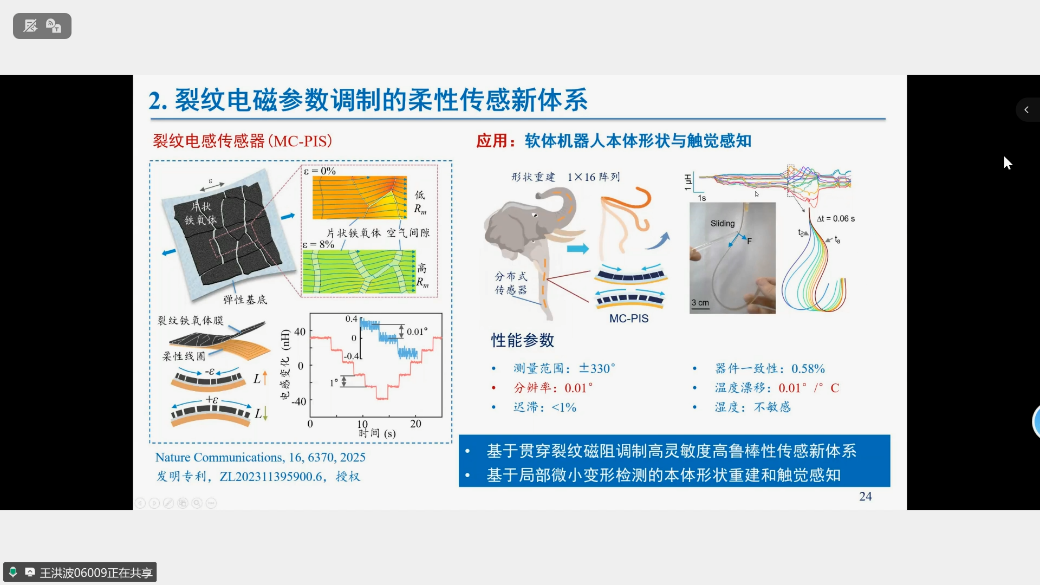
针对上述问题,他介绍了团队在新兴传感机理、多维力感知和触觉感知方面的研究成果。在柔性触觉传感方面,团队研制了能够兼顾微小力与冲击力测量的电感式柔性触觉传感器,并提出基于“矢量分析”的多模态视触觉感知框架,为机器人执行化学实验等复杂任务中的自主精细操作提供支持。在柔性传感新体系方面,团队利用裂纹对电磁参数的调制作用,实现对拉伸、压缩和弯曲变形的高灵敏感知,并将其用于软体机器人本体形状重建与触觉感知;同时,相关巨压容效应传感器可服务于类人主动触觉感知。
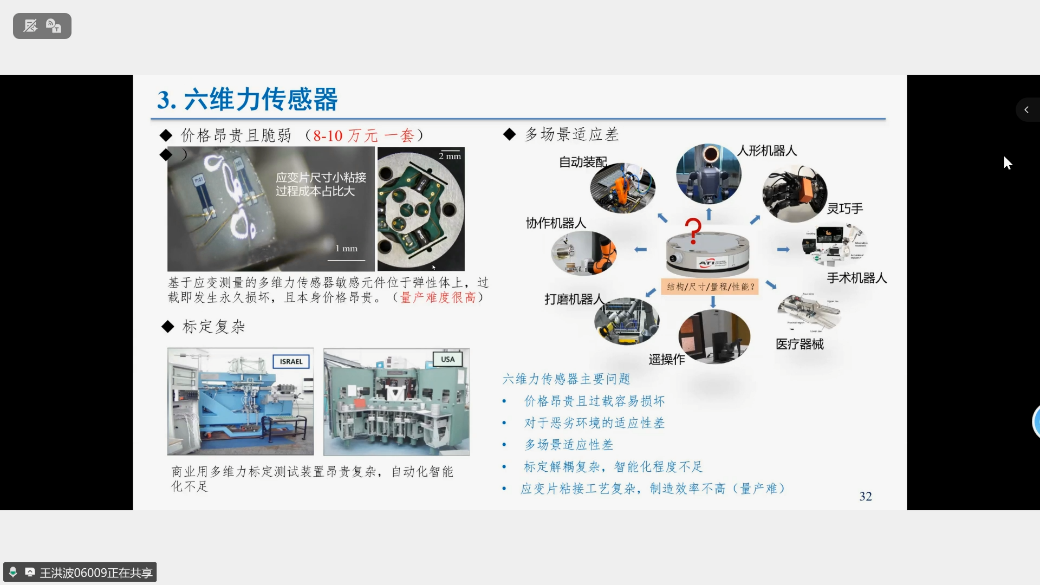
在六维力传感器方面,王洪波分析了现有产品价格昂贵、过载易损、标定复杂及多场景适应性不足等问题,展示了面向机械臂、足式机器人、人形机器人关节、灵巧手和手术机器人等场景研制的多种六维力传感器样机,以及自主研发的六维力智能标定平台。最后,他展望了机器人力触觉传感与数据采集系统的发展方向,提出通过多维力感知、多模态触觉及智能衣、智能鞋垫和智能手套等可穿戴设备,提升机器人复杂任务处理、灵巧操作和安全交互能力,并为人形机器人研究提供高质量数据支撑。
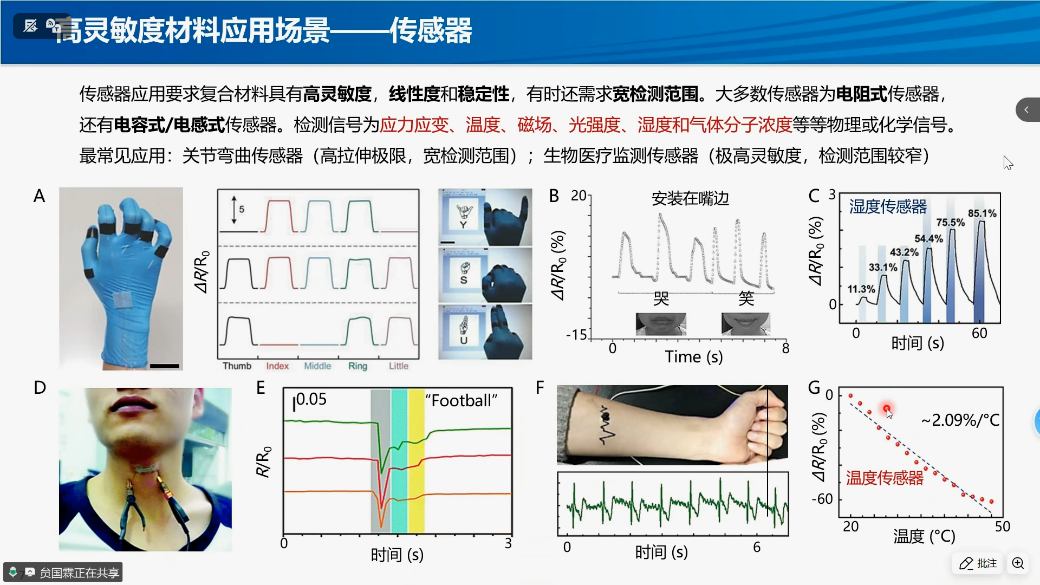
最后,贠国霖系友作题为“面向机器人智能环境交互——基于多尺度结构材料的三维力触觉技术”的主题报告。他围绕柔性导电复合材料的组成、结构设计及其在力触觉传感中的应用展开介绍。贠国霖指出,柔性导电复合材料将导电填料的导电性与聚合物基质的高可拉伸性相结合,在受力过程中可产生电阻或电容变化,从而实现对变形和接触力的测量,广泛应用于柔性传感器、可穿戴设备和机器人触觉等领域。其性能受到导电填料形态、填料网络以及聚合物基质的电学、机械和化学性质等多方面影响。
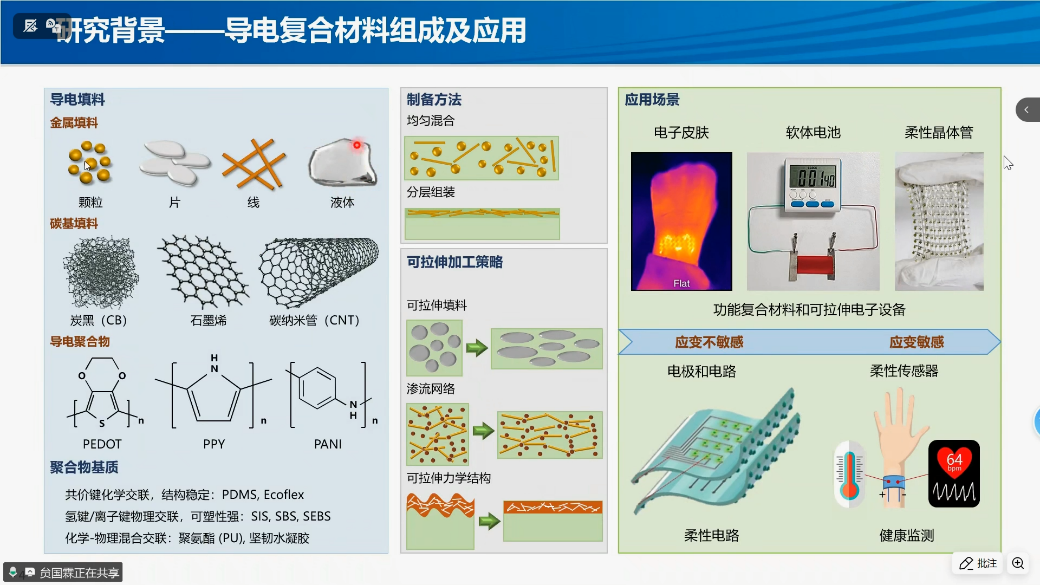
报告介绍了金属颗粒、片状与线状填料、炭黑、石墨烯、碳纳米管和导电聚合物等不同导电材料,以及均匀混合、分层组装和可拉伸加工等制备策略。针对电互连和柔性电路需要高导电性、高可拉伸性和低应变灵敏度,而传感器需要高灵敏度、线性度、稳定性及一定检测范围的不同需求,团队从填料网络和多尺度力学结构入手开展材料设计。其中,固—液混合微颗粒网络可产生反常压阻效应;各向异性填料网络能够增强轴向压力响应,并在一定程度上降低横向应力、温度和磁场的干扰;应力集中表面结构则可放大压力响应,拓展高灵敏度、大量程的压力测量能力,并用于手势意图识别和假肢手控制。
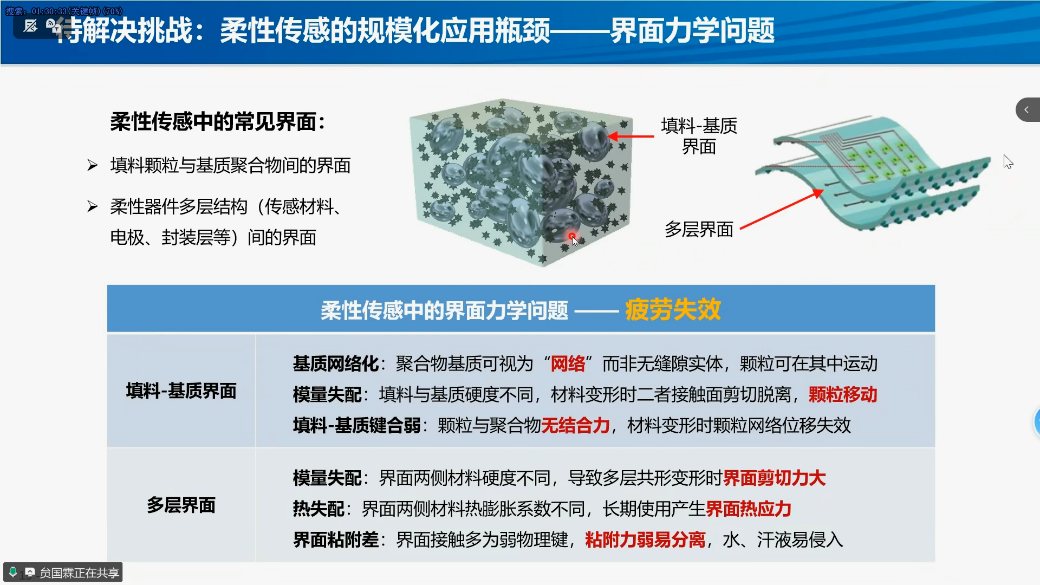
在三维力触觉检测方面,贠国霖介绍了基于纳米、微米和宏观多尺度结构的微型三维力传感技术。通过设计各向异性颗粒网络、互连微孔结构和仿真皮肤表面阵列,并利用锥形力敏单元在法向力和剪切力作用下形成的不同压力分布,可实现法向力与切向力的信号分离和三维力测量,为机器人触觉电子皮肤及复杂接触信息检测提供技术支撑。最后,他指出,柔性传感器规模化应用仍面临填料与基质界面、多层器件界面的模量与热失配、黏附不足以及长期使用中的疲劳失效等界面力学问题,未来仍需进一步提升器件的可靠性与稳定性。
在互动交流环节,三位系友围绕机器人力触觉感知、柔性传感器及软体机器人等前沿方向,与参会系友展开深入探讨,并耐心解答了大家提出的问题。线上交流气氛热烈,观点碰撞充分。本次系友交流论坛在浓厚的学术氛围中圆满结束,集中展现了中国科学技术大学精密机械与精密仪器系系友在前沿科学研究与工程技术实践中的创新成果,也进一步促进了系友之间的学术交流与思想互鉴。
报告人简介:
李木军(9509),中国科学技术大学精密机械与精密仪器系副教授,2007年博士毕业于中国科学技术大学,2007-2009年同步辐射国家实验室博士后,2012-2013年俄亥俄州立大学和2019-2020年南加州大学访问学者。主要研究兴趣在于多材料跨尺度功能3D打印,面向仿生人工肌肉和柔性触觉传感等机器人关键基础技术,研究和发展了多种创新的先进制造方法,推动其在柔性功能器件中的应用。主持国家自然科学面上和青年基金,安徽省自然科学基金面上项目等多个项目。同时作为研究骨干参与国家重点研发项目,以及国家自然科学基金委面上项目3项。曾获中国科学院教育教学成果一等奖。以最后通讯/第一作者在Nature Communications (3篇),Advanced Materials (2篇), ACS Nano, Advanced Functional Materials, Device等发表高水平论文40余篇。
王洪波,PB06009,现任中国科学技术大学工程科学学院、人形机器人研究院特任研究员、博导。分别于2010年和2015年在科大九系获工学学士和博士学位。入选中科院及安徽省等人才计划,曾获欧盟“玛丽·居里”学者、中国科学院院长特别奖、日内瓦国际发明展金奖等重要荣誉。长期致力于传感器与检测技术研究,聚焦机器人触觉与六维力传感器、可穿戴医疗健康监测、软体机器人感知、超精密位移传感器及传感电子电路等领域。迄今在Nature Communications,Advanced Materials, The Innovation, IEEE TMECH/TIF, Device等期刊和IEEE Sensors, IROS等会议发表论文60余篇(引用2600+次),多篇入选ESI高被引论文;获发明专利授权20余项。主持国家自然科学基金面上项目、安徽省创新攻坚计划重大项目、欧盟“玛丽·居里”学者项目、中科院人才项目及企业技术研发项目等多项重要课题,并积极推动相关核心传感技术的应用和产业化。个人主页:http://staff.ustc.edu.cn/-whbyn/
贠国霖博士现任中国科学技术大学近代力学系特任教授,博士生导师,海外优青。2017年本科毕业于中国科学技术大学近代力学系,2021年博士毕业于澳大利亚伍伦贡大学机械工程专业。曾任中国科学技术大学精密机械与精密仪器系博士后(2021-2022);英国剑桥大学皇家学会牛顿国际学者、高级研究员(2022-2024)。研究方向主要包括液态金属,多尺度结构化复合材料,及其在先进力学测量、多维触觉传感、自感知调控和可穿戴设备中的应用。迄今出版著作章节1部,在包括Nature Materials, Nature Communications, Science Advances, Matter等期刊发表论文40余篇,引用2000余次。