
在生物医学工程、微机电系统和微纳光子学等领域,微尺度物体操控——包括单细胞操作、微结构组装和微器件转移——具有极其重要的科学和应用价值。然而,现有微操控技术面临严峻挑战:机械式、磁力式或气液驱动式微夹持器通常结构尺寸较大,难以在小于300微米的狭窄空间内实现高精度单细胞级操控;而光镊虽能实现非接触高精度操控,但其可用力通常在皮牛量级,限制了稳定操控重型或不透明结构的能力。光学纤维兼具优异光传输性能、机械柔韧性和紧凑外形,为集成微夹持器提供了理想平台,但现有纤维集成微夹持器多采用单一材料体系,刚性材料缺乏变形能力,软材料虽能大变形却响应慢、力质比低,且大多为二维平面结构、尺寸偏大(约270微米至数毫米),难以实现复杂或不规则微目标的高精度单细胞级操控。
针对上述挑战,中国科学技术大学精密机械与精密仪器系吴东教授、胡衍雷教授、汪超炜教授团队首次报告了一种集成了刚性光刻胶“骨架”与掺杂银纳米颗粒的柔性温敏水凝胶“肌肉”的三维光纤集成微镊(optical fibre gripper, OFG)。该器件通过双光子聚合技术直接制备于商用多模光纤端面,整体尺寸仅为38×38×61 μm³,在近红外激光照射下可实现毫秒级响应(76.7毫秒)和约340微牛/毫克的超高力质比,较此前报道的光纤集成驱动器提升一至两个数量级。该OFG成功实现了对不透明颗粒、不规则微机械组件及多种单细胞类型的可靠操控,并在狭窄环境(<300微米)中展示了三维微组装和仿生采样的潜力,填补了光场捕获与毫米级机械微夹持器之间的“中间力区”空白。
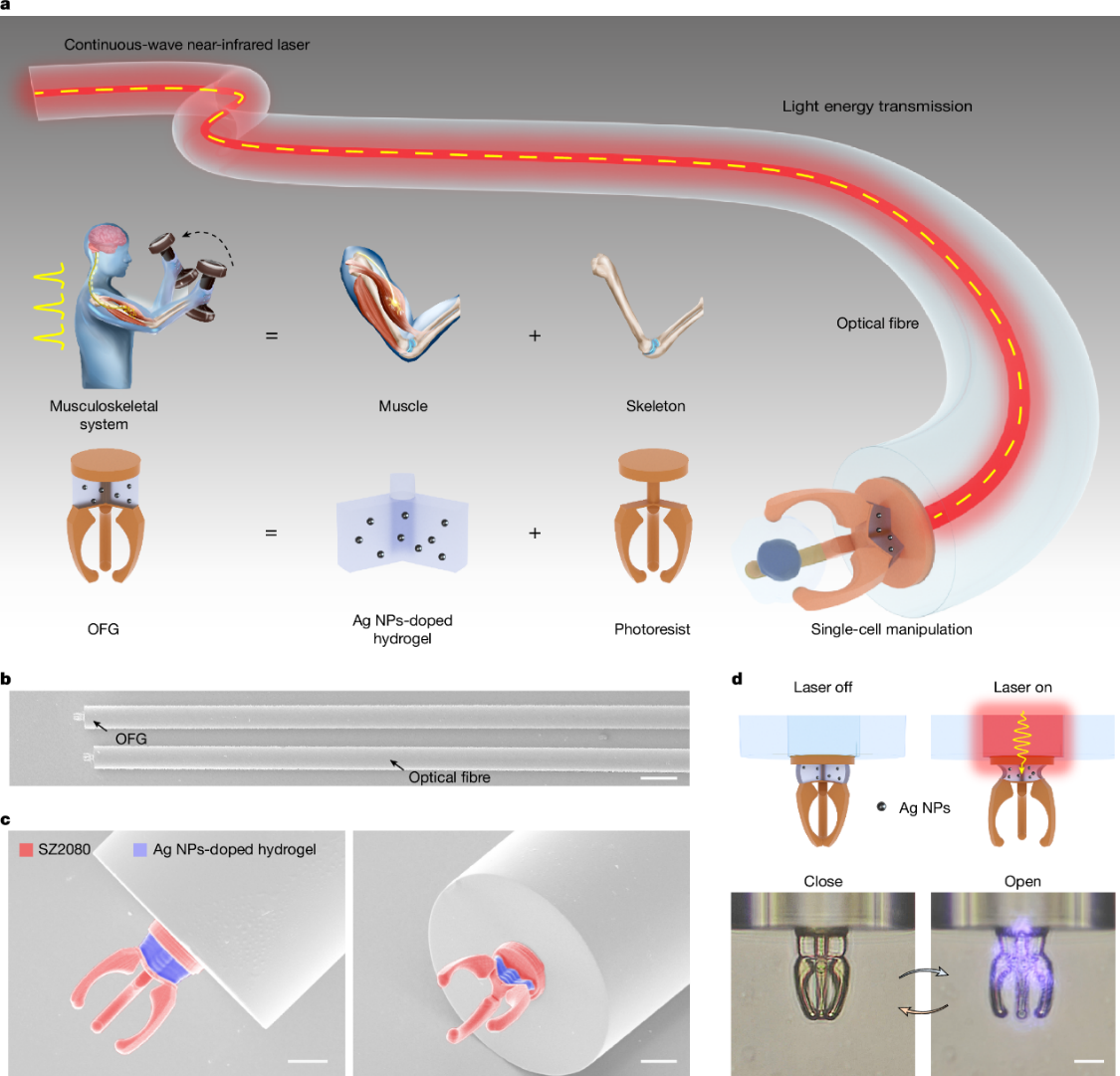
图1. 三维光纤微镊的设计与制造
图1展示了研究团队从生物肌肉系统中汲取灵感,将光学纤维作为能量传输通道,掺杂银纳米颗粒的温敏水凝胶模拟“肌肉”产生驱动力,刚性光刻胶微爪模拟“骨骼”实现机械力输出(图1a)。该OFG的开启与闭合由通过光纤传输的808纳米近红外激光调控:无激光时水凝胶水合溶胀,维持微镊闭合;激光照射时,掺杂的银纳米颗粒将光能高效转化为热能,破坏聚合物链与水分子间的氢键作用,引发水凝胶快速收缩,从而驱动微爪张开(图1d)。这种光纤导能-复合结构转换的集成设计,构成了一个完整的仿生“骨架-肌肉”光纤末端微系统。扫描电镜图像清晰展示了该器件在光纤端面上的制备形貌、俯视图及45°倾斜视角下的三维爪形几何结构(图1b、c)。
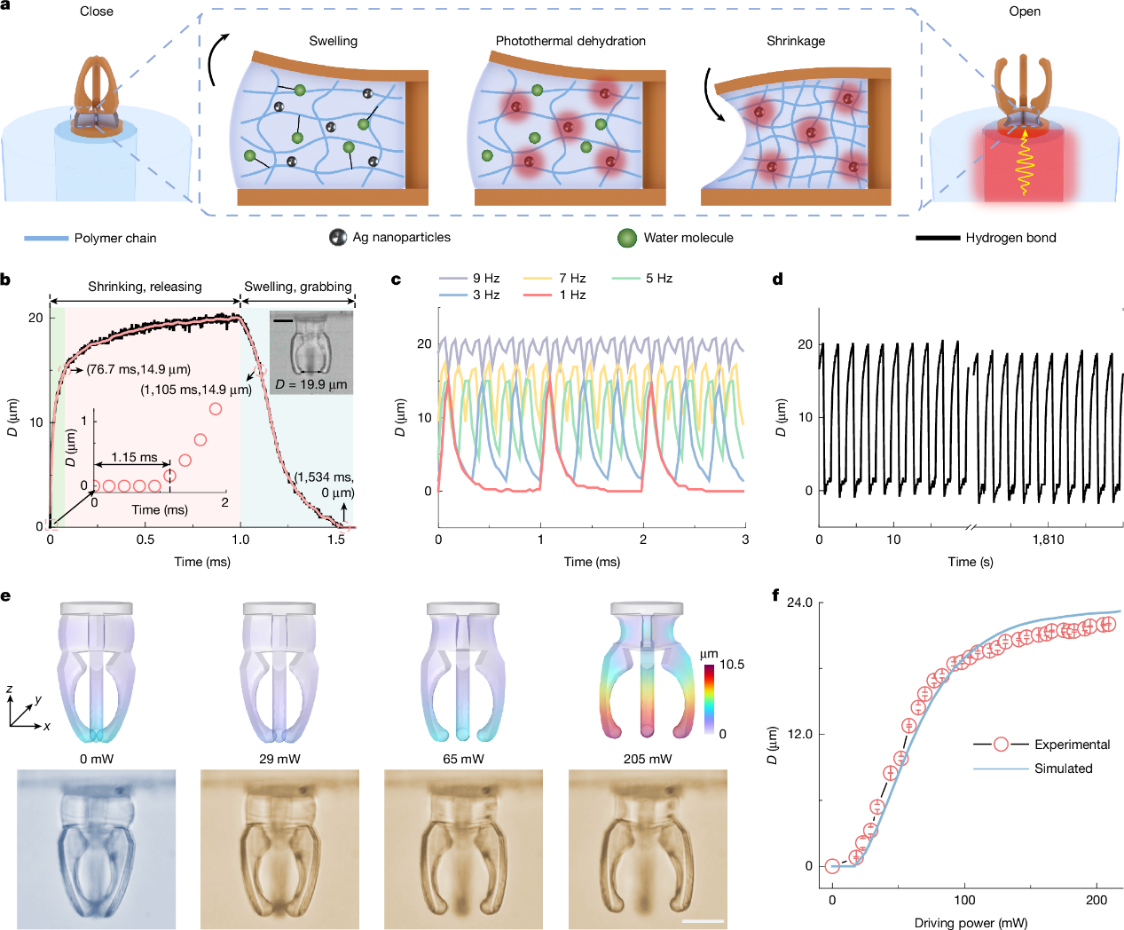
图2. 光控开合与力学输出性能
光学驱动性能表征显示,激光照射1.15毫秒后水凝胶即开始响应,OFG在76.7毫秒内达到最大开合行程(14.9微米)的75%,随后在1秒内稳定至19.9微米的张开距离;激光关闭后,微爪从最大张开回缩至14.9微米约需105毫秒,进一步恢复至近乎零位移约需429毫秒(图2b)。在固定脉冲宽度80毫秒下,驱动频率低于5赫兹时OFG可保持75%的最大开合行程(图2c);超过910次循环无明显性能退化(图2d),48小时耐力测试显示在典型驱动功率下稳定运行超过8.7万次循环。相较于传统基于单一材料体系的光纤集成微夹持器(通常约1赫兹工作频率),本器件的响应速度和操作频率均显著提升。多物理场耦合仿真验证了不同激光功率下的响应特性,205毫瓦时实验测得位移22微米,与模拟值23微米高度吻合(图2e、f);高密度银纳米颗粒掺杂可将驱动功率降至6-8毫瓦,有效抑制激光泄漏。图2a系统展示了该复合材料OFG的光纤集成与光热驱动工作机制。
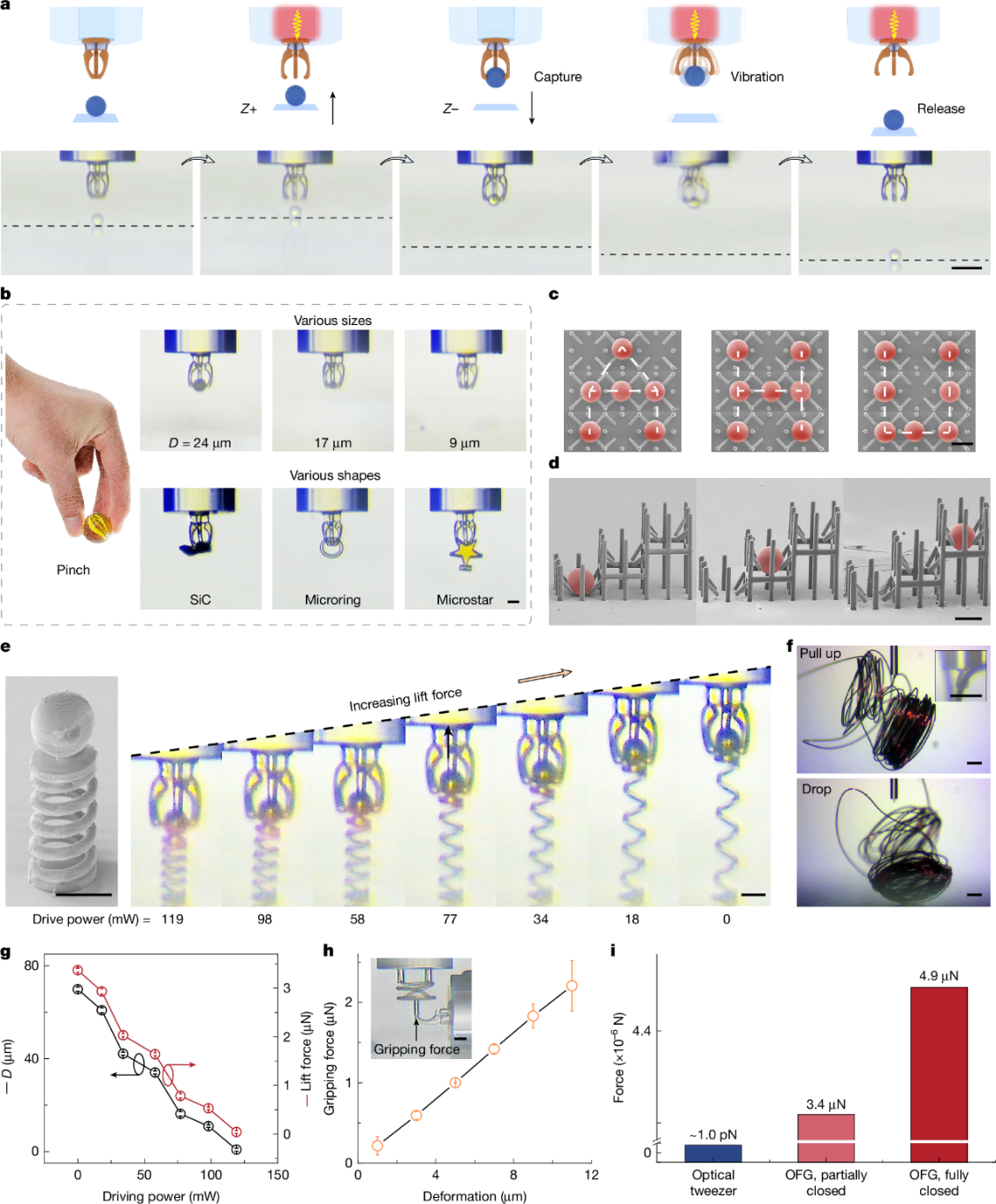
图3. 微米尺度目标操控与微结构装配
在操控能力方面,OFG展现出卓越的灵活性与负载能力。操作流程包括目标接近(激光关闭,OFG闭合)、目标捕获(激光开启,OFG张开并对准目标后关闭激光夹持)、转移(激光关闭)和释放(激光开启)四个步骤(图3a)。除了透明的二氧化硅微球,OFG还能捕获不透明且形状不规则的物体,成功抓取了不同尺寸的氧化铝微球、碳化硅微粒、聚合物微环和微五角星等,模仿了人手的夹捏功能(图3b)。研究团队利用OFG实现了可编程微组装操作:将目标粒子按二进制格式排列,在三个1×3网格中成功拼写出“AHU”字样(图3c);还将微球精确放置于基板上方不同高度,展示了三维操控能力(图3d)。为量化净提升力,团队制作了片上微弹簧力传感器,OFG对微球施加夹紧力产生摩擦力以拉伸和变形微弹簧(图3e)。测试表明,弹簧伸长量随驱动功率增加而减小,对应的净轴向提升力为0-3.4微牛(图3g);在完全闭合状态下,OFG成功提起长20厘米、直径20微米的铜线(图3f),对应的净拉力约4.9微牛(图3i)。考虑到器件质量仅约14.3纳克,其力质比高达约340微牛/毫克,比现有光纤驱动器至少高一个数量级。利用校准的微弹簧探针,测得每个爪尖的峰值夹持力约2.2微牛(图3h),且夹持力可通过驱动激光功率连续灰度调节,这对处理活细胞等脆弱物体尤为重要。图3i将光镊与OFG能对物体施加的力的大小进行了直观对比。
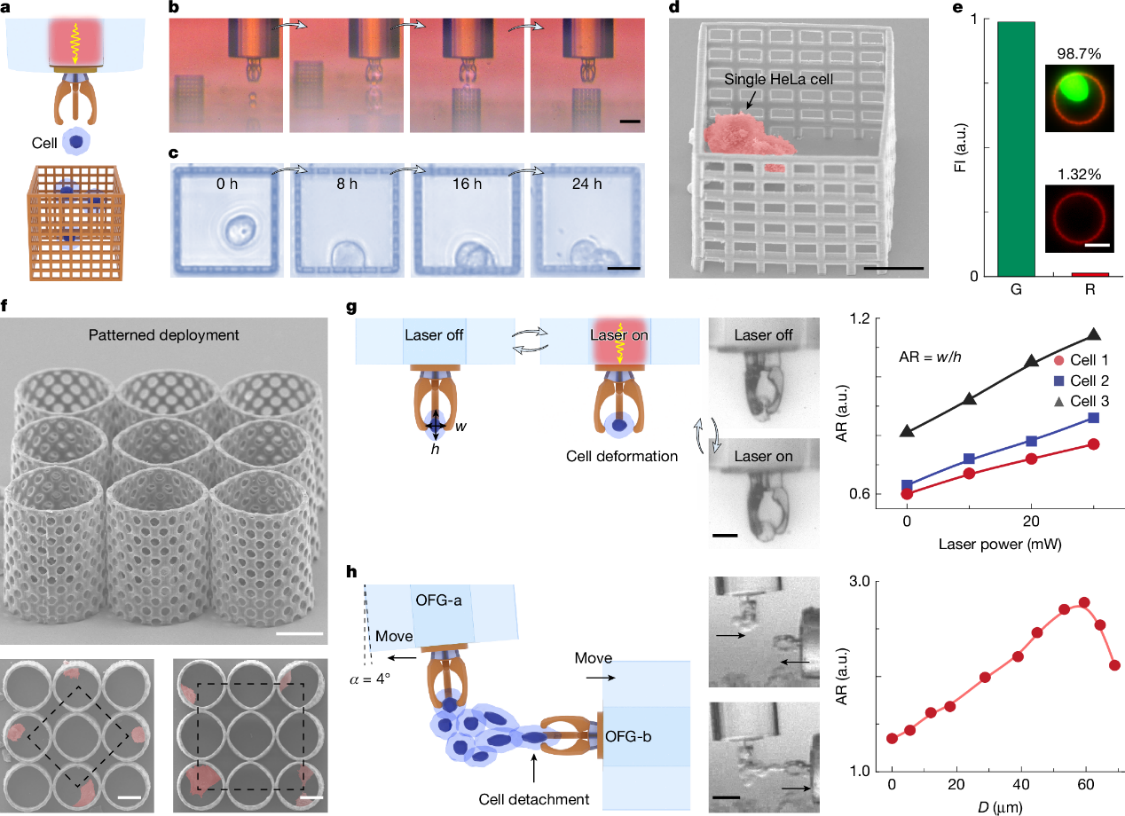
图4. 单细胞操作
在单细胞操控方面,OFG的可调驱动力、紧凑结构尺寸和灵活操控模式使其成为单细胞处理任务的理想工具(图4a)。研究团队以HeLa细胞为模型,在60-80毫瓦驱动功率下将悬浮单细胞逐个捕获并转移至细胞微笼中(图4b),捕获后细胞在培养过程中表现出正常的贴壁、铺展和分裂(图4c、d)。对120个经过完整抓取-转移-释放流程的细胞进行钙黄绿素-AM/PI染色验证,荧光统计显示存活率为98.7%(图4e)。除HeLa细胞外,成纤维细胞、甲状腺细胞和结直肠癌细胞等多种细胞类型均实现了高存活率操控。研究还展示了为细胞操控设计的微结构阵列,细胞被图案化并放置于八个指定位置(图4f);灰度级抓取控制表明细胞长宽比随驱动激光功率增加而增大(图4g)。双OFG协同操作成功从细胞簇中分离出单个细胞,右侧图为细胞长宽比随OFG-b拉伸位移变化的曲线(图4h),进一步验证了平台的灵活性。
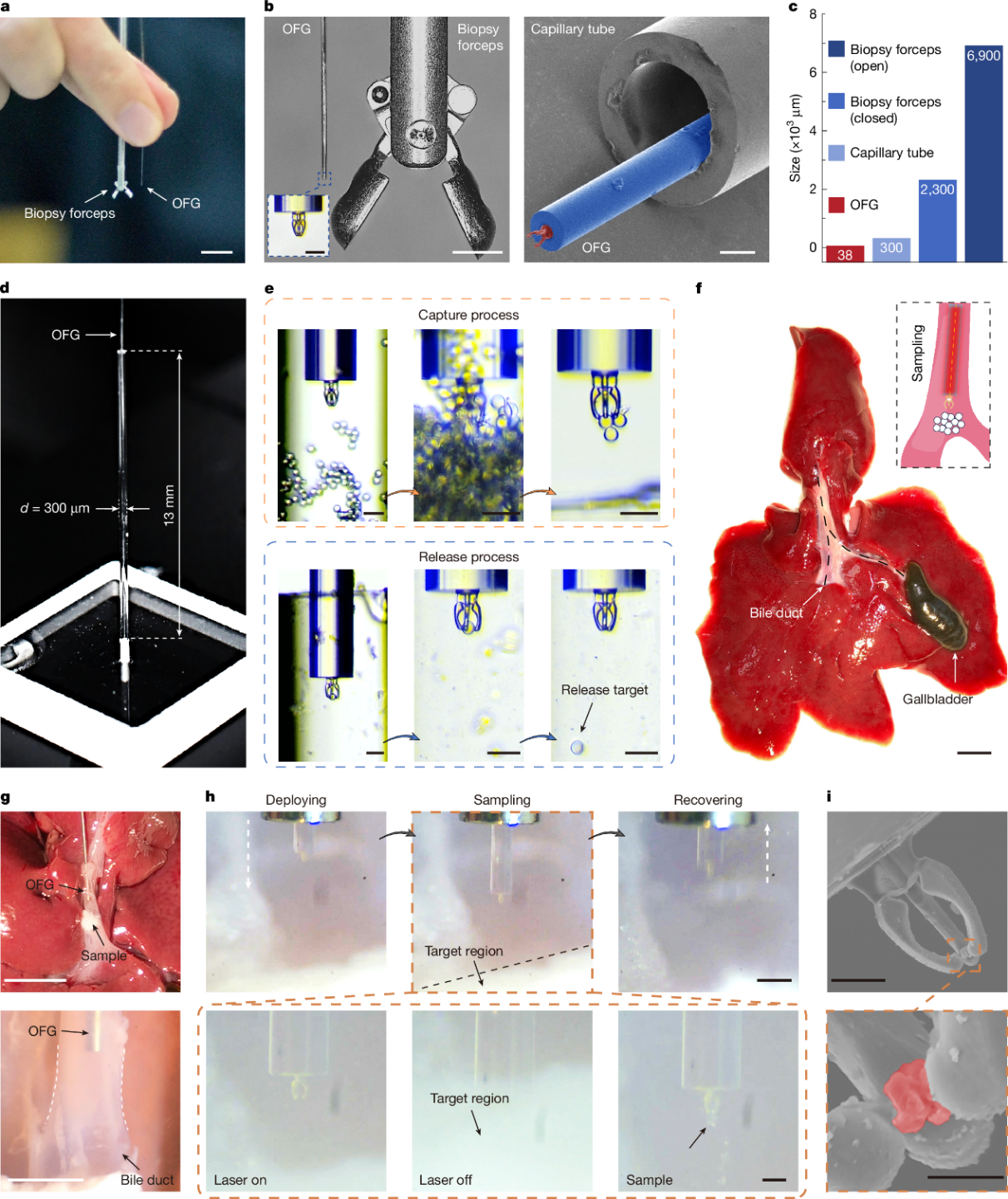
图5. 狭窄空间微尺度取样
OFG在狭窄空间采样中展现出独特优势。相较于活检钳和毛细管(图5a、b),OFG直径显著缩小(图5c),可顺畅通过内径仅300微米的毛细管。在长13毫米、内径300微米的毛细管模型中,OFG成功穿越至远端并完成微球的捕获与释放(图5d、e)。研究团队进一步在新鲜离体兔胆管中进行了采样操作(图5f):不锈钢导管插入胆管并向目标区域推进(图5g),胆管腔内OFG完成采样过程(图5h),扫描电镜图像清晰显示样本被捕获于OFG尖端,放大视图中样本被着色为红色(图5i)。图像引导的导管导航结合OFG可控伸缩,为未来体内研究提供了可行路径。
本研究报道的光纤集成微镊集刚性骨架与柔性温敏水凝胶肌肉于一体,形成紧凑型光驱微操控平台。其毫秒级驱动、微牛级夹持力和仅为38×38×61 μm³的尺寸,成就了340微牛/毫克的超强力质比,较此前光纤集成微夹持器提升一个数量级以上,较传统光镊高出三至五个数量级。更重要的是,OFG无需庞大外部驱动设备,基于标准商用光纤即可实现可规模化制备。除基本捕获释放功能外,光纤集成微镊支持不透明和不规则微物体的可靠操控及复杂微组件组装,并能实现精巧的单细胞操作和狭窄空间内的高精度采样。该光纤末端平台支持微镊形态的广泛定制,且与多种定位平台(包括机械臂和内镜系统)及医学影像引导天然兼容,可适应复杂姿态和轨迹操作,为集成化多功能操控系统开辟了道路,在微组装、单细胞操控、微创介入和显微手术等领域展现出广阔应用前景。
相关研究成果以“Optical fibre gripper for high-performance 3Dmicromanipulation"为题发表在国际顶级期刊《Nature》(DOI:10.1038/s41586-026-10673-7)。《Nature》同期发表了题为“Light-controlled microgripper punches above its weight”的观点文章(News & views),评价团队“提出了一套突破性解决方案:一款由光纤光信号驱动的三维机械微型夹持器,这款光纤夹持器无需在高精度与强作用力之间二选一,二者性能同时兼备。这项技术有望革新硅基芯片微型光子器件、微机电系统的加工制造。随着此类设备持续迭代,未来不仅有望替代光镊等现有微观操控手段,还将进一步拓宽微米、纳米尺度下可操作物体的边界”。微纳米工程实验室毕业生潘登为论文第一作者,吴东教授、胡衍雷教授、汪超炜教授以及张晨初副研究员为共同通讯作者,以上作者均来自或毕业于精密机械与精密仪器微纳米工程实验室。该工作得到了国家重点研发计划,国家自然科学基金等项目的支持。
原文链接:https://www.nature.com/articles/s41586-026-10673-7